Openmind: Nền tảng hệ điều hành phi tập trung cho robot
Openmind là gì?
Openmind là một dự án dành cho robot và các tác nhân tự động hóa. Sản phẩm chủ lực chính của Openmind là OM1, đây là phần mềm được thiết kế giúp người dùng có thể tạo một nhân vật AI và chạy trên đám mây, cũng như trên phần cứng robot vật lý mà không cần chuyên sâu về vật lý.

Về cơ bản, Openmind muốn tập trung vào việc xây dựng một nền tảng phần mềm mở, giúp robot có thể suy nghĩ, học hỏi và làm việc cùng nhau giảm rào cản kỹ thuật hệ thống độc quyền làm thiếu khả năng phối hợp và giao tiếp giữa các AI robotics.
Sản phẩm chính của Openmind
Nền tảng OM1
OM1 là hệ điều hành mã nguồn mở (open-source) dành cho robot thông minh, được thiết kế để chạy trên nhiều thiết bị vật lý và kỹ thuật số khác nhau. OM1 tích hợp AI gốc (AI-native), liên kết các yếu tố như nhận thức, bộ nhớ, lập kế hoạch và điều khiển, giúp robot hiểu ngữ cảnh và hành động độc lập.
Không chỉ vậy OM1 giúp người dùng có thể tương tác với OpenAI hoặc Gemini, Claude, DeepSeek và bắt tay với nó, thông qua phần cứng robot vật lý được điều khiển bởi một hoặc nhiều LLM. Các tác nhân/robot sẽ được xây dựng trên OM1 có thể thu thập dữ liệu từ nhiều nguồn (web, X/Twitter, camera và LIDAR) từ đó mà thực hiện tác vụ công việc cho người dùng.
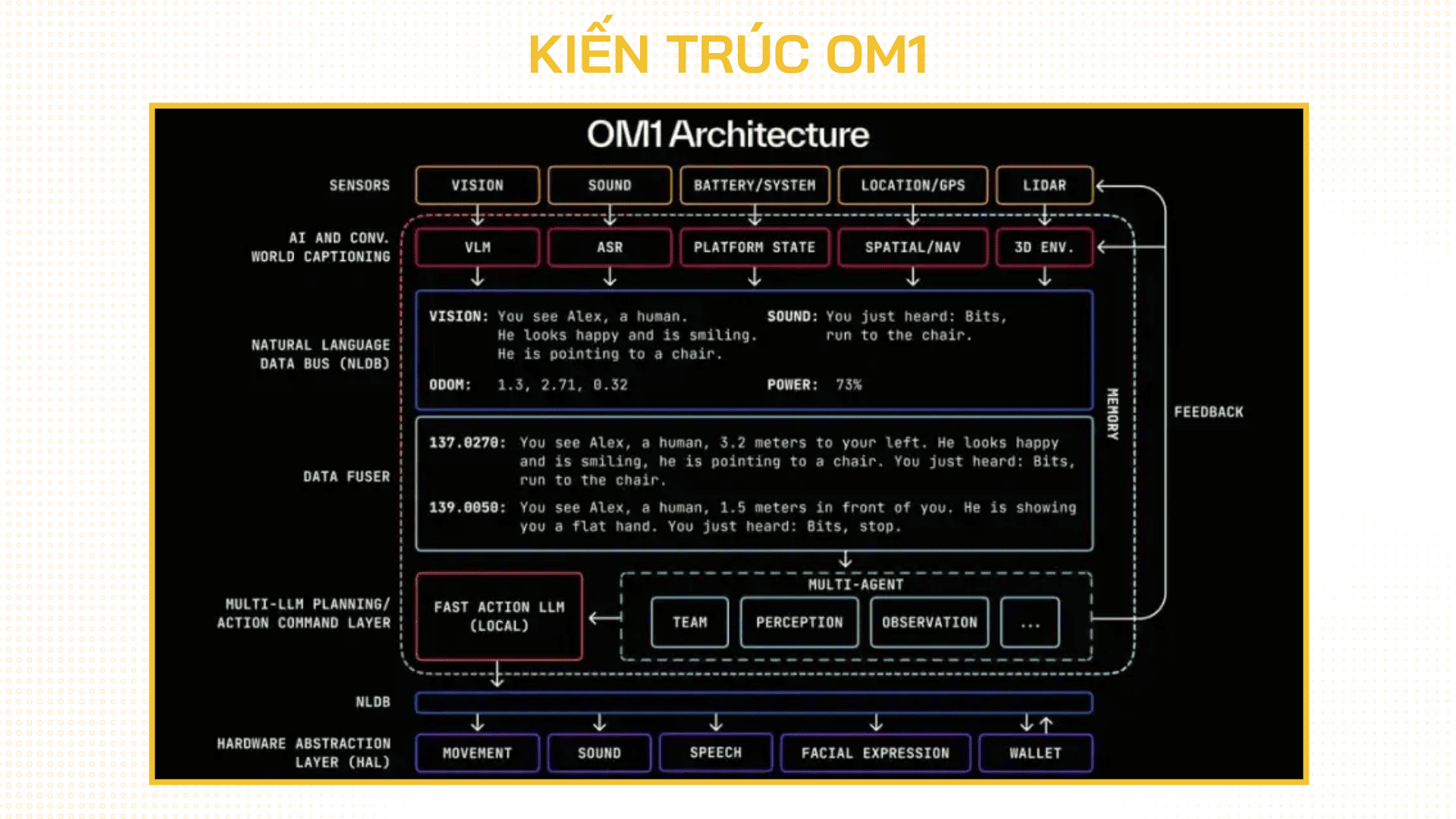
Về chi tiết cách thức hoạt động của kiến trúc OM1, giao thức được thiết kế theo dạng phân tầng, giúp robot có thể tiếp nhận dữ liệu từ môi trường, xử lý ngôn ngữ, hợp nhất thông tin và cuối cùng là ra quyết định hành động. Mỗi tầng đảm nhiệm một vai trò quan trọng trong việc biến tín hiệu thô thành hành vi có ý nghĩa, bao gồm các tầng như sau:
- Tầng cảm biến (Sensors): Bao gồm thị giác (vision), âm thanh (sound), GPS, Lidar, hệ thống pin và trạng thái hệ thống. Đây là nơi OM1 thu nhận dữ liệu đầu vào từ thế giới vật lý.
- Tầng AI và chú thích thế giới (AI and Conversational World Captioning): Dữ liệu cảm biến được xử lý bởi các mô-đun AI như VLM (Vision-Language Model), ASR (Automatic Speech Recognition), Platform State, Spatial/NAV và 3D Environment. Tầng này giúp “dịch” dữ liệu thô thành ngôn ngữ tự nhiên có thể hiểu được.
- Tầng truyền dữ liệu ngôn ngữ tự nhiên (NLDB): Toàn bộ thông tin sau khi được chú thích sẽ được đưa vào NLDB, biến thành “dòng dữ liệu ngôn ngữ” liên tục, mô tả chi tiết trạng thái thế giới mà robot quan sát được.
- Tầng hợp nhất dữ liệu (Data Fuser): OM1 hợp nhất nhiều nguồn thông tin (thị giác, âm thanh, chuyển động, năng lượng…) thành ngữ cảnh duy nhất. Tầng này giúp robot hiểu được mối liên hệ giữa các dữ liệu – ví dụ: “Alex đang mỉm cười, đứng cách 3.2m và chỉ tay về phía chiếc ghế”.
- Tầng lập kế hoạch đa LLM (Multi-LLM Planning / Action Command Layer): Tại đây, hệ thống dùng LLM hành động nhanh (Fast Action LLM Local) và các mô-đun hỗ trợ như Team, Perception, Observation để đưa ra quyết định hành động. Đây là bộ não “ra lệnh” cho robot dựa trên dữ liệu hợp nhất.
- Tầng trừu tượng phần cứng (Hardware Abstraction Layer – HAL): Cuối cùng, các lệnh được gửi xuống tầng phần cứng thông qua HAL, điều khiển các chức năng như di chuyển, âm thanh, giọng nói, biểu cảm khuôn mặt và ví điện tử (wallet). Đây là lớp giao tiếp trực tiếp với robot vật lý.
Người dùng có thể hiểu kiến trúc OM1 được chuẩn hóa trí tuệ robot thành bốn bước phổ quát: Nhận thức → Ghi nhớ → Lập kế hoạch → Hành động. Thay vì dựa vào mã cứng nhắc, cụ thể cho từng nhiệm vụ, OM1 tích hợp nhận thức, mô hình nền tảng, bộ nhớ và bối cảnh cho phép robot nhìn thấy và diễn giải môi trường của chúng, hiểu ngôn ngữ tự nhiên và điều chỉnh hành động của chúng theo thời gian thực.
Giao thức FABRIC
Giao thức FABRIC là mạng phối hợp phi tập trung cho phép các robot giao tiếp, nhận diện và chia sẻ tri thức một cách an toàn. Khác với cách robot vận hành cô lập trước đây, FABRIC giống như một “mạng xã hội” dành cho máy móc ở đó mỗi robot có danh tính số đáng tin cậy, có thể xác thực vị trí, tình trạng của nhau và trao đổi thông tin theo thời gian thực. Ví dụ, một robot giao hàng có thể nhận ra và xác thực một xe tự lái Waymo đang đến, rồi tự động giao bưu kiện cho xe đó nhờ FABRIC phối hợp.
Nhờ kết nối tin cậy máy - với - máy mà FABRIC đem lại, robot có thể học hỏi lẫn nhau gần như tức thì một robot học được kỹ năng hoặc ngôn ngữ mới có thể chia sẻ ngay cho các robot khác qua mạng, không cần huấn luyện lại từ đầu. FABRIC được thiết kế mở và robot-agnostic tương tự OM1, nhằm hình thành một hạ tầng hợp tác cho robot ở quy mô lớn.
Ngoài ra, giao thức này cũng mở đường cho các ứng dụng mở rộng như giao dịch phi tập trung giữa các máy (thanh toán, bảo hiểm) hoặc hình thành thị trường dịch vụ giữa các robot trong tương lai.
Cách tham gia airdrop của Openmind
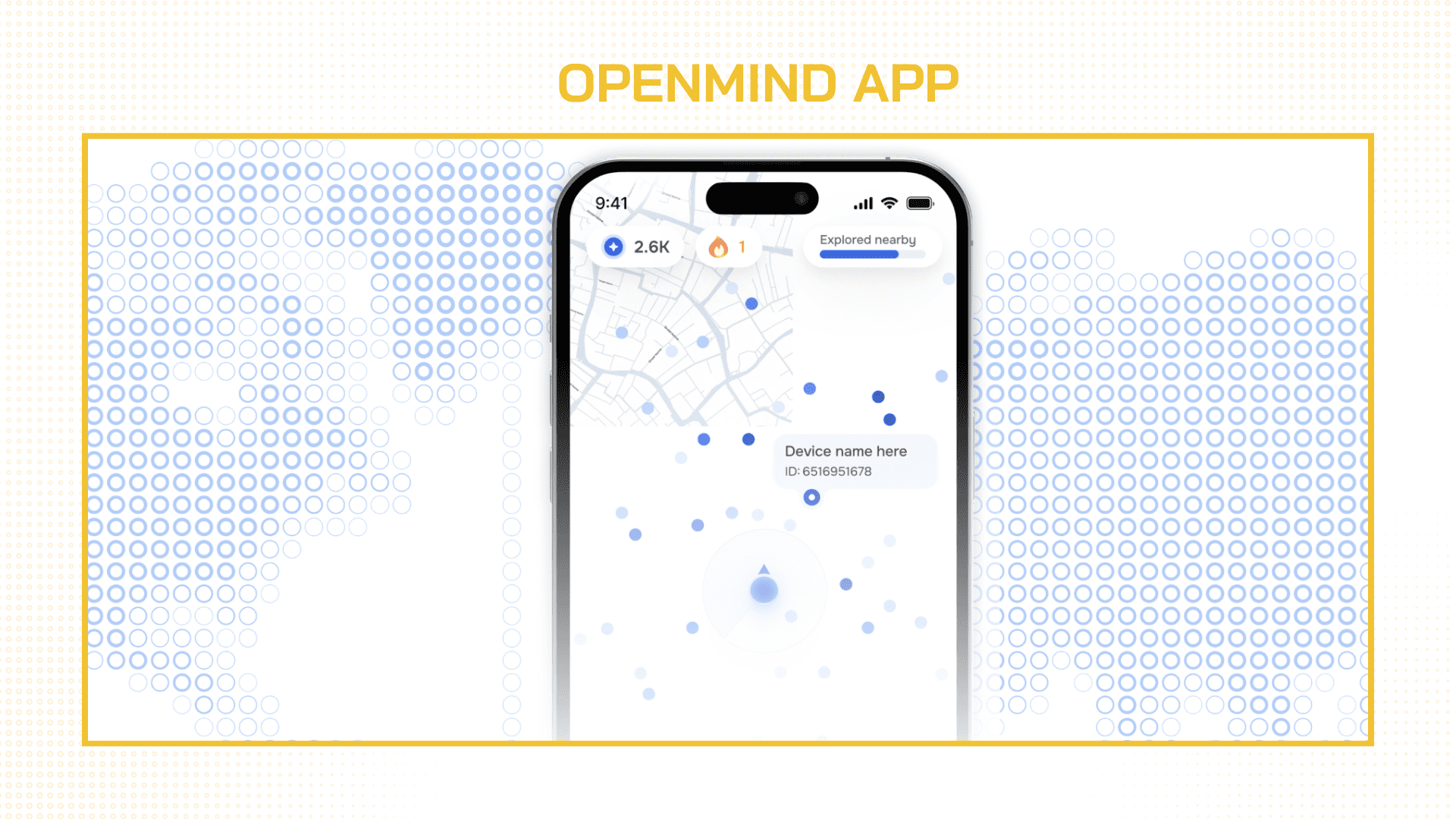
OpenMind đã ra mắt một ứng dụng di động cho phép chúng ta đi bộ quanh thành phố và tích điểm. Ứng dụng sẽ quét ẩn danh các đường phố xung quanh bạn, cải thiện bản đồ.
Hiện tại, chỉ 1,000 người dùng hàng đầu trên bảng xếp hạng mới có quyền truy cập, nhưng mỗi tuần sẽ có ngày càng nhiều người dùng có thể tích điểm như:
- Tuần 1 (9/8) – 1000 người dùng hàng đầu
- Tuần 2 (9/15) – 20% hàng đầu
- Tuần 3 (9/23) – 75%
- Tuần 5 (9/30) – Tất cả người dùng trong danh sách chờ
- Tuần 6 (10/6) – Ứng dụng mở cửa cho tất cả mọi người.
Hiện tại ứng dụng của Openmind đang hiện có trên mọi nền tảng IOS và Android nên người dùng có thể linh động tải.
Đội ngũ và nhà đầu tư Openmind
Đội ngũ dự án Openmind
OpenMind được dẫn dắt bởi đội ngũ sáng lập có chuyên môn cao trong các lĩnh vực AI, robotics và blockchain. Chính sự kết hợp giữa nền tảng học thuật sâu về kỹ thuật với kinh nghiệm kinh doanh & đầu tư đã tạo nên thế mạnh cho dự án. Những thành viên chủ chốt gồm có:
- Jan Liphardt (Founder & CEO): Ông đồng thời là phó giáo sư Bioengineering tại Đại học Stanford, có bằng tiến sĩ từ Đại học Cambridge, từng được vinh danh Searle Scholar và Sloan Fellow.
- Paige Xu (Founding Member & Head of Growth): Cô từng là quản lý đầu tư cao cấp tại quỹ OKX Ventures và tư vấn tại McKinsey trước khi đồng hành lập nên OpenMind.
- Boyuan Chen (CTO): Chịu trách nhiệm dẫn dắt phát triển kỹ thuật. Anh là nhà nghiên cứu AI tại phòng thí nghiệm CSAIL của MIT, có nền tảng đào tạo từ UC Berkeley và từng làm việc tại Google DeepMind.

Nhà đầu tư Openmind
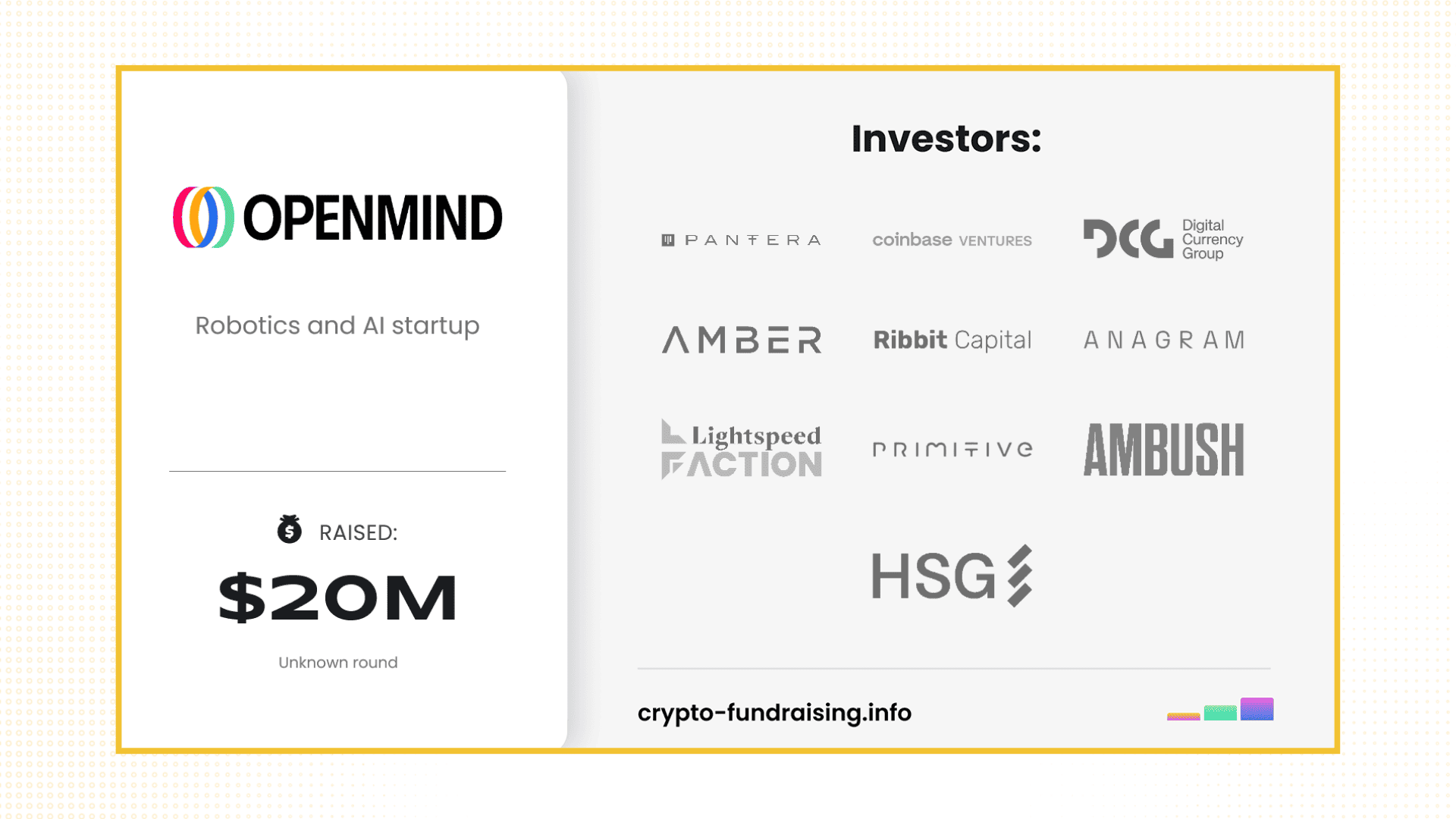
Openmind đã thực hiện thành công vòng gọi vốn trị giá 20 triệu USD vào tháng 8/2025 gần đây với quy tụ nhiều cái tên nổi trội như: Pantera Capital, Coinbase Ventures, Ribbit Capital, DCG, điển hình cái tên được nhắc tới nhiều gần đây là Pi Network cũng đã tham gia trong quá trình gọi vốn của Openmind.
Các dự án tương tự
- SparkChain AI: Giao thức DePIN, nơi người dùng đóng góp băng thông internet và tài nguyên tính toán không sử dụng để hỗ trợ hoạt động của các hệ thống trí tuệ nhân tạo (AI).
- Natix Network: Dự án xây dựng cơ sở hạ tầng phi tập trung để thu thập dữ liệu không gian địa lý theo thời gian thực từ camera của người dùng (điện thoại thông minh, drone, camera hành trình...).