PrismaX (PIX): Tham vọng xây dựng lớp hạ tầng cho robot toàn cầu
PrismaX là gì?
PrismaX là dự án xây dựng lớp cơ sở mở cho robotics thực tế, kết nối con người, robot và các hệ thống AI một cách liền mạch và minh bạch. Mục tiêu của PrismaX là trở thành cầu nối giữa robotics truyền thống và việc áp dụng đại trà, nơi mọi người có thể điều khiển robot từ xa, tạo dữ liệu huấn luyện chất lượng cao và cuối cùng giúp robot tự chủ thông minh hơn.
Đọc thêm: Khi blockchain gặp AI, robot và… không cần Internet
Vấn đề cơ bản của ngành Robotics
Khi robot ngày càng tham gia sâu vào đời sống và sản xuất, rào cản lớn nhất của lĩnh vực này không còn nằm ở phần cứng hay thuật toán. Vấn đề cốt lõi hiện nay là thiếu một lớp điều phối dữ liệu và tiêu chuẩn mở, nơi robot, con người và các hệ thống AI có thể phối hợp với nhau một cách linh hoạt mà không phụ thuộc vào một bên trung gian duy nhất.
Sự thiếu hụt này dẫn đến nhiều giới hạn mang tính cấu trúc. Điều này dẫn đến:
- Không có giao thức chung để điều khiển hoặc phối hợp các robot khác nhau.
- Việc thu thập dữ liệu thực tế quy mô lớn còn thiếu và phân tán, khiến các mô hình AI huấn luyện cho robot không thể đạt được khả năng tự chủ cao.
- Robot vẫn phụ thuộc quá lớn vào tiêu chuẩn riêng của từng công ty, hạn chế việc áp dụng rộng rãi và tương tác giữa các hệ thống khác nhau.
PrismaX cho rằng chìa khóa để tháo gỡ những nút thắt này nằm ở việc xây dựng một “lớp điều phối mở”. Thông qua việc kết hợp công nghệ blockchain với các tiêu chuẩn mở, PrismaX hướng tới việc đặt nền móng cho một hệ sinh thái robot phi tập trung, nơi dữ liệu, quyền điều phối và khả năng tương tác được phân bổ minh bạch, tạo điều kiện cho robot và AI phát triển vượt ra khỏi các hệ sinh thái khép kín hiện tại.
Các sản phẩm của PrismaX
PrismaX không tiếp cận robotics bằng một sản phẩm đơn lẻ, mà xây dựng một hệ sinh thái tích hợp dựa trên bốn trụ cột cốt lõi, mỗi trụ cột giải quyết một điểm nghẽn then chốt trong quá trình đưa robot tiến gần hơn tới mức độ tự chủ và khả năng mở rộng toàn cầu.
Teleoperation: Lớp giao tiếp giữa con người và robot
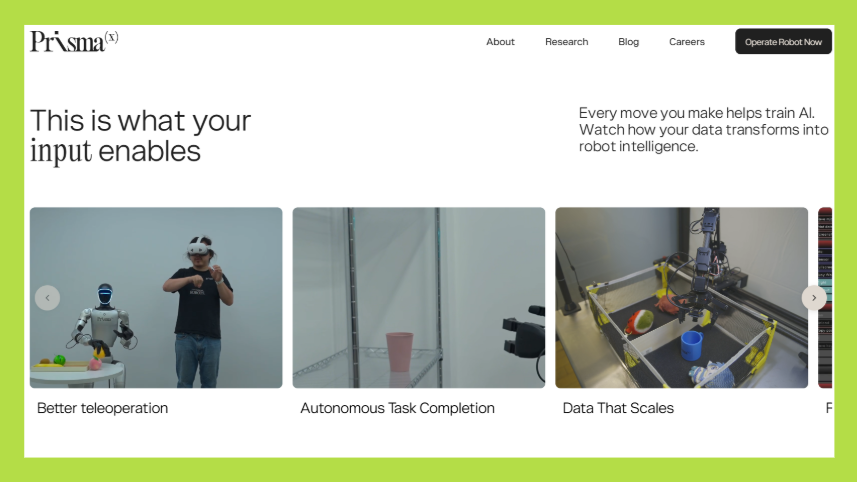
Teleoperation trong PrismaX không chỉ là điều khiển robot từ xa, mà được thiết kế như một lớp giao tiếp tiêu chuẩn hóa giữa con người và robot. Mọi thao tác, phản xạ và quyết định của người điều khiển đều được ghi nhận như dữ liệu hành vi có giá trị, phục vụ cho việc huấn luyện AI trong môi trường thực.
PrismaX xây dựng hạ tầng teleoperation độ trễ thấp, cho phép điều khiển robot qua trình duyệt hoặc ứng dụng bằng video thời gian thực, tín hiệu điều khiển và phản hồi cảm biến. Hệ thống này không phụ thuộc vào một loại robot cụ thể, mà có thể mở rộng sang nhiều nền tảng phần cứng thông qua các chuẩn phổ biến như ROS/ROS2.

Trong quá trình teleoperation, con người không chỉ “ra lệnh” cho robot, mà trực tiếp truyền tải cách tương tác với thế giới vật lý: cầm nắm, di chuyển, điều chỉnh lực và xử lý các tình huống không xác định - những dữ liệu mà mô phỏng khó tái tạo. Đây cũng là điểm khởi đầu cho cơ chế khuyến khích của PrismaX, khi người tham gia đóng góp dữ liệu vận hành thực và được ghi nhận giá trị trong hệ sinh thái.
Về mặt kinh tế, teleoperation còn là điểm khởi đầu cho cơ chế khuyến khích của PrismaX. Người tham gia điều khiển robot đóng góp trực tiếp vào hệ sinh thái dữ liệu và được ghi nhận giá trị thông qua điểm thưởng và cơ chế token hóa trong tương lai.
Data: Dữ liệu thực là tài sản chiến lược của AI Robotics
Nếu teleoperation là hành động, thì dữ liệu là kết quả cốt lõi mà PrismaX hướng tới. Điểm khác biệt lớn của PrismaX so với các nền tảng robotics truyền thống nằm ở việc coi dữ liệu teleoperation là một loại tài sản có thể đánh giá, sàng lọc và sử dụng có hệ thống.
Mỗi phiên điều khiển robot tạo ra nhiều lớp dữ liệu: video từ camera robot, tín hiệu điều khiển, trạng thái môi trường và kết quả nhiệm vụ. PrismaX không thu thập dữ liệu một cách thô sơ mà tích hợp Eval Engine, một hệ thống đánh giá chất lượng dữ liệu dựa trên mức độ chính xác, ổn định và hiệu quả của hành vi điều khiển.
Điều này giải quyết một vấn đề then chốt của ngành AI: không phải mọi dữ liệu đều có giá trị như nhau. Dữ liệu tốt giúp mô hình học nhanh và chính xác hơn, trong khi dữ liệu kém có thể làm sai lệch hành vi robot. PrismaX tạo ra cơ chế lọc để đảm bảo chỉ những dữ liệu có giá trị huấn luyện cao mới được sử dụng cho các bước tiếp theo.

Ở góc độ dài hạn, kho dữ liệu này trở thành nguồn tài nguyên chiến lược cho việc huấn luyện các mô hình AI vật lý, đồng thời mở ra khả năng chia sẻ dữ liệu giữa các công ty robotics, nhà nghiên cứu và đối tác trong hệ sinh thái.
Robot: Tác nhân vật lý trong thế giới thực
Trong PrismaX, robot không được xem là lớp ứng dụng bên ngoài hay công cụ trình diễn, mà là thành phần cốt lõi của vòng lặp học tập giữa con người, dữ liệu và AI. Khác với các mô hình AI thuần phần mềm, robot buộc phải vận hành trong thế giới vật lý – nơi tồn tại sai số cảm biến, ma sát cơ học, độ trễ và những tình huống không thể mô phỏng đầy đủ trong môi trường ảo.
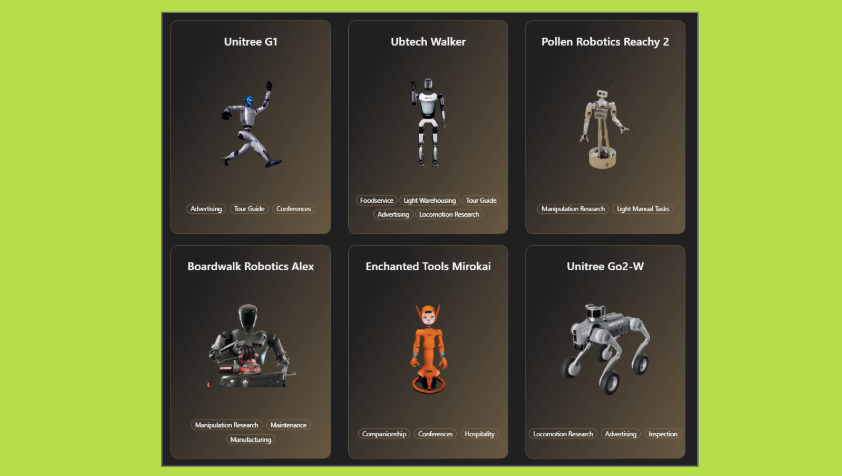
PrismaX tích hợp nhiều loại robot khác nhau, bao gồm robot thao tác, robot di chuyển và các nền tảng phần cứng tùy chỉnh, nhằm mở rộng không gian nhiệm vụ và bối cảnh vận hành. Trong kiến trúc này, mỗi robot đóng vai trò như một điểm thu thập và kiểm chứng dữ liệu vật lý, nơi hành vi của con người (qua teleoperation), phản hồi từ môi trường và kết quả thực thi được ghi nhận một cách liên tục.
Robot vì vậy không chỉ “thực thi lệnh”, mà trở thành môi trường kiểm tra thực tế cho các mô hình AI. Khi dữ liệu tích lũy đủ lớn và mô hình được cải thiện, PrismaX cho phép từng bước giảm mức độ phụ thuộc vào điều khiển thủ công, chuyển sang các chế độ bán tự động, nơi AI hỗ trợ một phần thao tác trong giới hạn được kiểm soát. Cách tiếp cận này phản ánh logic phát triển cốt lõi của hệ thống: AI không được triển khai trước rồi mới tìm dữ liệu, mà được huấn luyện và kiểm chứng song song với robot trong điều kiện vận hành thực.
Model: Nền tảng trí tuệ cho robot thế hệ mới
Toàn bộ teleoperation, dữ liệu hành vi và hoạt động của robot trong PrismaX đều hội tụ tại lớp mô hình AI, đóng vai trò trung tâm trong kiến trúc hệ thống. PrismaX hướng tới phát triển nền tảng lõi cho robotics - các mô hình nền tảng được thiết kế để học và suy luận trong thế giới vật lý, tương tự vai trò của các mô hình ngôn ngữ lớn đối với AI phần mềm.
Những mô hình này được huấn luyện trực tiếp từ dữ liệu teleoperation và vận hành thực, giúp robot học mối quan hệ giữa quan sát, hành động và kết quả trong điều kiện không lý tưởng của môi trường vật lý. Thay vì chỉ tái hiện các kịch bản cố định, mô hình dần hình thành khả năng tổng quát hóa, thích nghi với tình huống mới và cải thiện hiệu suất theo thời gian.
PrismaX không tiếp cận việc phát triển model theo hướng khép kín. Nền tảng được thiết kế để mở cho hợp tác, cho phép các nhóm nghiên cứu, startup robotics và đối tác công nghiệp cùng tham gia huấn luyện và khai thác mô hình. Theo cách đó, PrismaX định vị mình như một lớp hạ tầng dữ liệu và huấn luyện chung, thay vì một hệ thống AI biệt lập.
Token của PrismaX là gì?
Hiện tại, PrismaX tiết lộ sẽ xây dựng hệ sinh thái kinh tế xung quanh token gốc là PIX, có vai trò:
- Là phương tiện thanh toán và xác định quyền truy cập các dịch vụ trong hệ sinh thái.
- Khuyến khích teleoperator và người đóng góp dữ liệu.
- Hỗ trợ các hoạt động staking, mint/burn và cơ chế phân phối giá trị khuyến khích dài hạn.
Đội ngũ phát triển và nhà đầu tư PrismaX
Đội ngũ phát triển PrismaX
Bayley Wang (Co-Founder & CEO) có nền tảng nghiên cứu robotics tại MIT, từng làm việc tại MIT CSAIL với các dự án liên quan đến robot, thuật toán và phần cứng. Trước PrismaX, ông tham gia xây dựng thiết bị AR/robot và sáng lập một công ty công nghệ tiêu dùng từ thời sinh viên. Bayley tập trung vào bài toán giúp robot hiểu và xử lý dữ liệu thế giới thực cho AI vật lý.
Chyna Qu (Co-Founder & COO) có kinh nghiệm trong hệ thống phi tập trung và cơ chế khuyến khích dựa trên blockchain. Bà từng đảm nhiệm vai trò quản lý tại các công ty công nghệ, làm việc với dữ liệu phân tán và crowdsourcing. Tại PrismaX, Chyna phụ trách mô hình kinh tế dữ liệu và cơ chế khuyến khích cộng đồng tham gia teleoperation và tạo dữ liệu cho robotics AI.
Nhà đầu tư & vòng gọi vốn PrismaX
Ngày 16/6/2025, trong vòng gọi vốn ban đầu, PrismaX đã huy động thành công 11 triệu USD từ các quỹ và tổ chức lớn như a16z crypto CSX, Stanford Blockchain Accelerator, Symbolic Capital, Volt Capital, Virtuals Protocol...
Roadmap PrismaX
PrismaX định hướng phát triển theo ba giai đoạn:
Giai đoạn 1 – Ưu tiên teleoperation & dữ liệu
Giai đoạn 2 – Mở rộng dịch vụ & thương mại
Giai đoạn 3 – Robot tự chủ & nền kinh tế robot
Robot sẽ đạt mức độ tự chủ cao hơn nhờ các mô hình huấn luyện sâu, PrismaX sẽ mở rộng sang cung cấp dịch vụ sản xuất quy mô lớn và tạo ra một “nền kinh tế robot” thật sự.
Dự án tương tự
- Nexus: Layer 1 tương thích với EVM, Nexus cung cấp một hạ tầng tính toán có thể kiểm chứng giúp các AI Agent không chỉ hoạt động mà còn tham gia trực tiếp vào nền kinh tế on-chain.
- Openmind: Dự án tập trung vào robot và các tác nhân tự động hóa. Sản phẩm chủ lực chính của Openmind là OM1, đây là phần mềm được thiết kế giúp người dùng có thể tạo một nhân vật AI và chạy trên đám mây, cũng như trên phần cứng robot vật lý mà không cần chuyên sâu về vật lý.